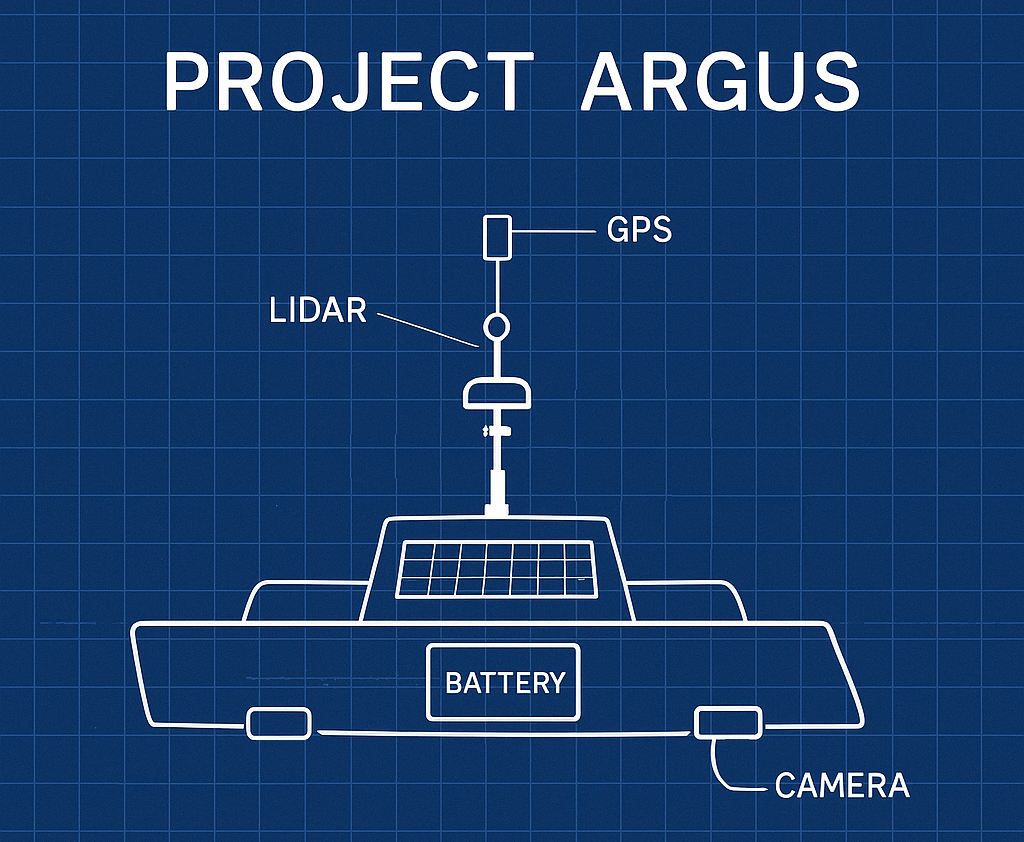
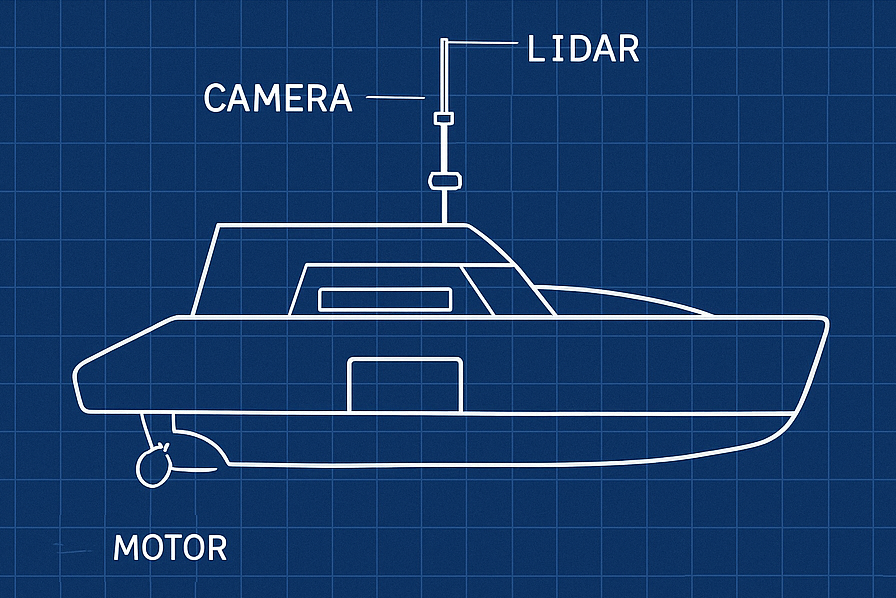
Project Argus marks a major milestone for Marinor NTNU as we embark on the development of our first Autonomous Surface Vessel (ASV). This project will allow us to combine our knowledge in robotics, automation, and marine technology into a fully operational, unmanned vessel capable of navigating and performing tasks on water.
The goal of Project Argus is to design, build, and test a functional ASV while giving our members hands-on experience in all aspects of maritime autonomy. From mechanical design and electronics to control systems and software integration, the project provides a comprehensive learning environment where theory meets practical application.